
Tesla Releases Large FSD Beta Update
Since October 2020, Tesla has been slowly rolling out the FSD Beta and has been testing it by a select group of its owners. Tesla has said that all owners who get access to FSD Beta are evaluated by a 'safety scoring system', measured by the need for their driving behavior to perform well for seven consecutive days with a score of 98 or higher.
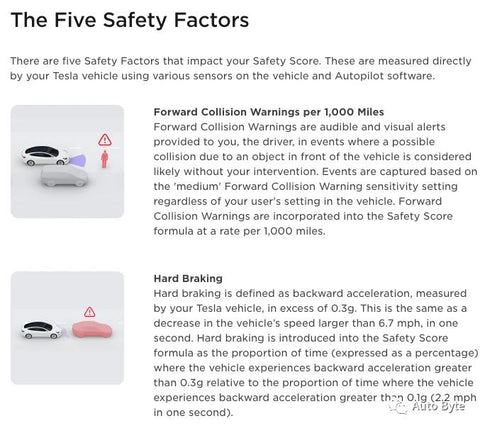
It is understood that the "safety scoring system" is a scoring system launched by Tesla last year to evaluate the driver's safety behavior, through the five indicators of forward collision warning, emergency braking, sharp turns, unsafe following, and forced disengagement of Autopilot every 1000miles to determine the good or bad driving habits of the owner.
According to the U.S. law, if the current self-driving car has an accident, the responsibility is on the driver and not on the Autopilot system. Moreover, although Tesla named FSD (Full Self-Driv) as a fully automated driving system, its capability is still at L2 level. This is seen in the market as a way to take two steps forward and one step back, because although FSD Beta will be frequently updated or released with some new features, the autonomous response capability of its Autopilot system to additional complex scenarios is not only not progressing compared to the past, but also seeing signs of regression.

As of the fourth quarter of 2021, the company said nearly 60,000 owners had participated in the FSD Beta program, and the most recent major update was FSD Beta 10.10 in early February 2022, which was not as effective.
Tesla FSD Beta 10.11
Tesla has now begun pushing a new FSD Beta 10.11 release, which officials say is an extremely important update. Tesla CEO Elon Musk said that if this update "performs well," Tesla will likely lower the entry criteria for participation in FSD Beta and expand the push to vehicles with a safe driving score of 95.
According to Musk on Twitter, the vector lane in FSD Beta 10.11 is a major architectural improvement to Tesla's artificial intelligence. This will allow vehicles to more accurately predict cross lanes and reduce unnecessary slowdowns when turning and merging.
In addition, according to the release notes for FSD Beta 10.1, this version also makes certain fixes for issues encountered in version 10.1, with improved functionality and scenario performance. Referring to a video uploaded by YouTuber user AI Addict in February of this year of FSD Beta 10.10 being tested in the San Jose metropolitan area in the United States, this version of the system had a series of problems due to capacity limitations as follows.
drove into the tram tracks.
Crashing into a bicycle lane bollard at 11 mph (approximately 17.7 km/h).
Failing to stop to yield at a crosswalk where a pedestrian was about to pass.
Stopping at a distance.
Fighting for control of the steering wheel.
Inability to recognize certain traffic signs.
And on this updated FSD Beta 10.11, Tesla has reduced the rate of vehicle parking errors by 17% by increasing the size of the data set by 14% and also improving the accuracy of braking timing. The FSD algorithm also improves the ability to make more accurate predictions about roads and improve understanding of road rights-of-way in cases where maps are inaccurate or cars are unable to follow navigation.
FSD Beta 10.11 also features Tesla's next-generation auto-labeling tool, which can be used to improve detection rates for vulnerable road users (VRU), reducing the false positive rate for "cyclists and pedestrians" by 44.9%, a problem that plagued the previous version.
The following are the specific updates.
Upgraded the modeling of lane geometry from a dense raster (pocket of dots) to an autoregressive decoder that uses a transformer neural network to directly predict and connect 'vector space' lanes point by point. This enables vehicles to predict cross lanes, i.e. allowing for lower computational cost and less error post-processing, and paves the way for predicting other signals and their joint and end-to-end relationships. Use more accurate algorithms for predicting vehicle turns or merging lanes to reduce unnecessary slowdowns.
FSD algorithms can further improve the understanding of road rights-of-way if maps are inaccurate or cars are unable to follow navigation. In particular, modeling of intersection segments is now based entirely on network predictions and no longer uses map-based heuristic models.
VRU detection accuracy is improved by 44.9%, significantly reducing false pedestrian and bicycle judgments (especially near asphalt joints, brake marks and rain spots). This was achieved by increasing the data size of the next-generation auto-labeling tool, training previously frozen network parameters, and modifying the network loss function. Overall, the incidence of false slowdowns associated with VRU was reduced.
Predicted speed errors for approaching motorcycles, scooters, wheelchairs and pedestrians were reduced by 63.6%. To this end, FSD introduced a new simulation against high-speed VRU interaction dataset.
Improved Idle Mode (Creeping Mode), now with higher variable acceleration at the beginning and end of idle.
Control of nearby obstacles has been enhanced by predicting the static geometry over continuous distances versus the general static obstacle network.
By increasing the dataset size by 14%, the vehicle parking error rate has been reduced by 17% and the accuracy of brake lights has also been improved.
Improved performance in many difficult scenarios by adjusting the loss function, and improved the speed error by 5% for clear scenes and 10% for road scenes.
Improved the detection and control of the car door in the open state.
Improved turn smoothing through an optimization-based approach to determine which routes do not need to be controlled given lateral and longitudinal acceleration and acceleration limits and vehicle kinematics.
The stability of the FSD Ul visualization was improved by optimizing the Ethernet data transfer pipeline by 15%.